α β γ フィルタ

Abgfilter File Exchange Matlab Central

Alpha Beta Filter Wikipedia

Alpha Beta Filter Wikipedia

Alphabetafilter File Exchange Matlab Central

Alpha Beta Filter Wikipedia

Alpha Beta Filter Wikipedia
レーダによる追尾フィルタは 目標位置を観測値として 位置 速度などの目標運動諸元の真値を推定するものである その代表例はカルマンフィルタを使用した追尾フィルタである また 演算負荷低減の観点より カルマンフィルタの簡略版であるα βフィルタあるいはα β γフィルタを使用した追尾フィルタが広く使われている ここで 位置 速度の目標運動諸元の算出にはα βフィルタ 目標の加速度が必要な場合はα β γフィルタが使用される ところで 実用的な追尾フィルタは安定であることが必要であり α βフィルタはゲインαおよびβが0より大きく1より小さい値の範囲では常に安定であることが報告されている しかし α β γフィルタについては報告がない 本論文では 追尾フィルタとしてα β γフィルタを使用した場合の安定性を明らかにした まず α βフィルタとは異なり α β γフィルタはゲインα βおよびγが0より大きく1より小さい値の範囲で必ずしも安定とは限らないことを示した しかしながら カルマンフィルタ等から導出される3種類のα β γフィルタは安定であることを示した.
α β γ フィルタ. α β γフィルタを提案し その特性を解析した 14 15 そ の結果 加速度観測値を併用することによる特性改善 お よび従来のpom position only measured α β γフィ ルタより追尾精度が改善するための厳密な条件を示した. J93 b no 11 と呼ぶ すると α β フィルタは 時刻t k における 目標位置平滑値を x sk 予測値を pk 観測値をx ok 目標速度の平滑値をx sk 予測値をx pk 位置のゲイ ンをα k 速度のゲインをβ k としたとき 以下の式 5 8 で定義される. α β γフィルタの安定性と最適ゲイン 小菅 義夫 系 正義 計測自動制御学会論文集 38 4 361 368 2002 04 30. 各種α β γフィルタの比較 小菅 義夫 系 正義 電子情報通信学会論文誌.
電子情報通信学会和文論文誌b 2017年2月号

Alpha Beta Gamma Filters By Steve Rogers Issuu
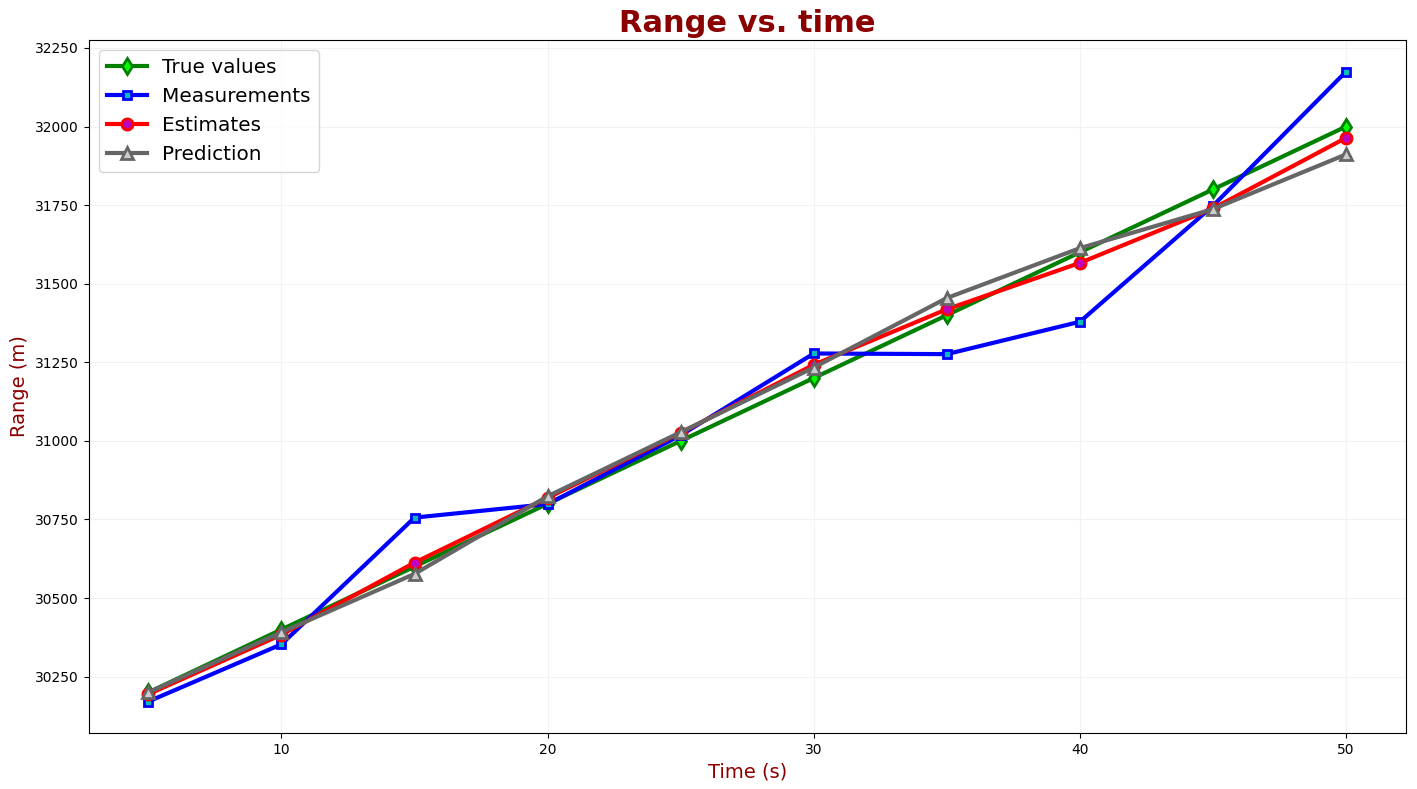
The Alpha Beta Gamma Filter
Peter Ponders Pid Kalmanfilters Alpha Beta Gamma Filters Youtube
Adaptive A B G Filter For Target Tracking In Three Dimensional Space Download Scientific Diagram
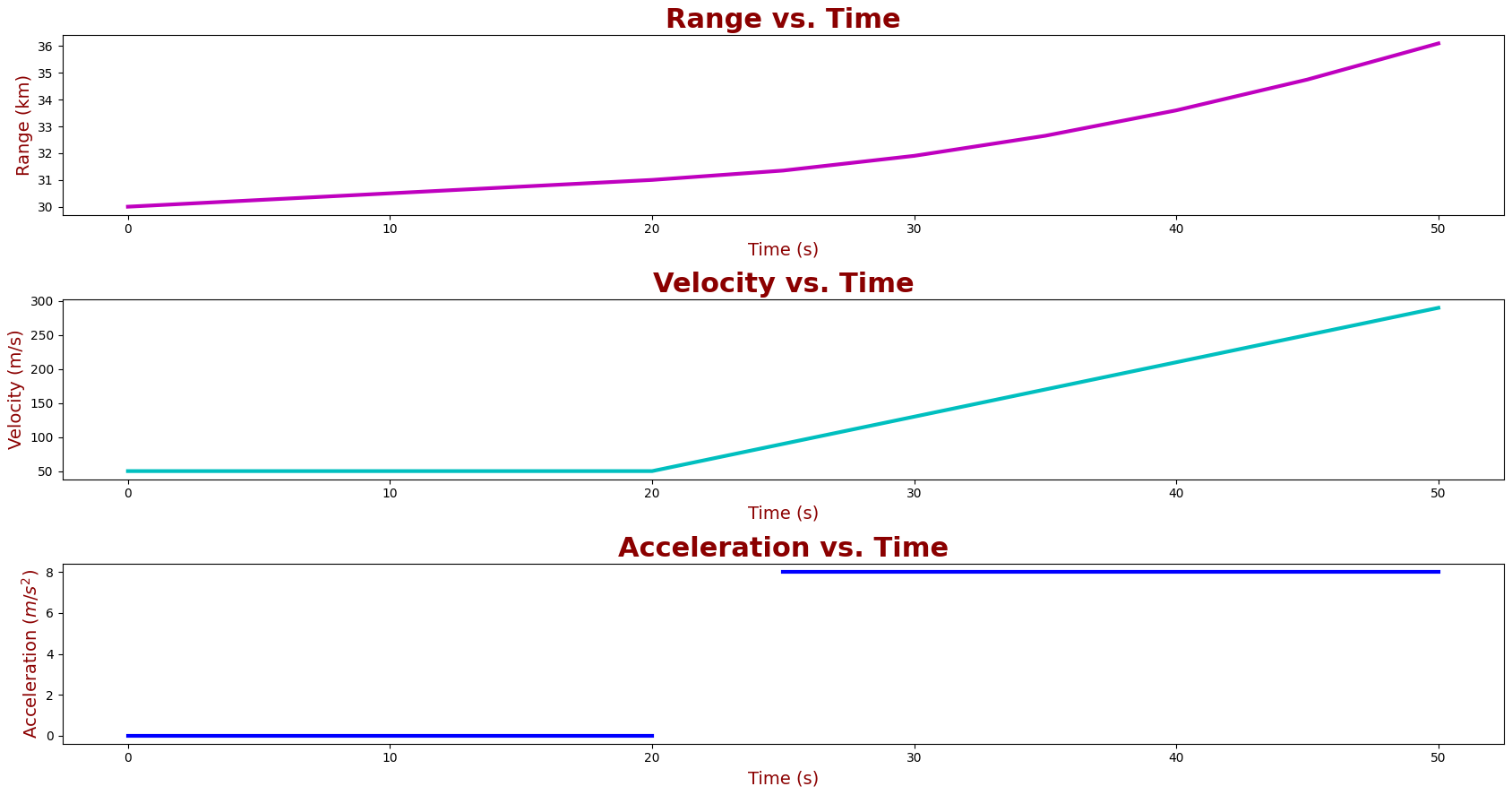
The Alpha Beta Gamma Filter
The Alpha Beta Gamma Filter

Adrian Boeing Blog Alpha Beta Filters

Advanced Control Alpha Beta Gamma Filters Text Plcs Net Interactive Q A
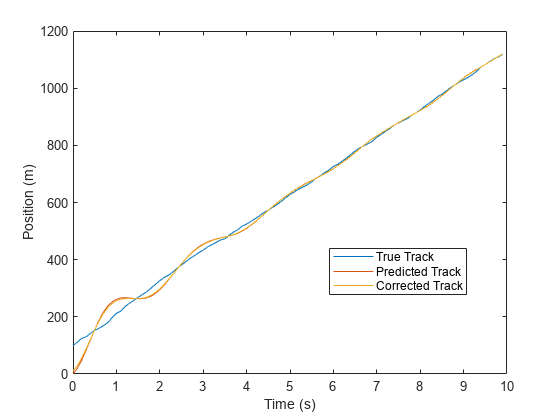
Alpha Beta Filter For Object Tracking Matlab Mathworks 日本
The Alpha Beta Gamma Filter
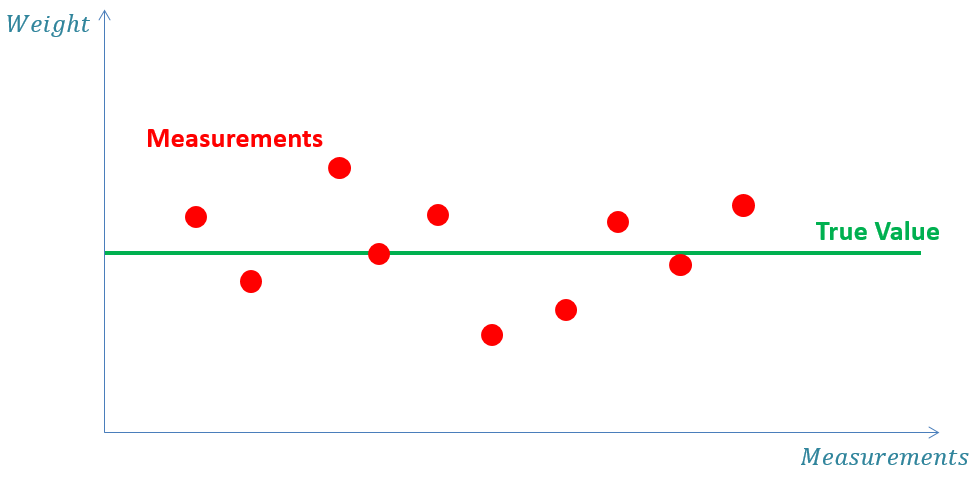
Filtering

File Alpha Beta Filter 1 5 5 Jpg Wikipedia

Estimation Error Of A B G Filter With Gr 1 Gp 1 G2 0 75 Download Scientific Diagram
Source : pinterest.com